如果你想找個簡單易上手、一天左右就能完成的項目,或者想讓孩子們了解機器人和電子學的世界,那就把這個光追機器人作為你的周末項目吧。它的原理非常簡單,而且可以用很多你可能已經有的零件,以無數種方式搭建出來。不過現在,我就來詳細說說我是怎麼做的。
所需材料:
- 兩台小型直流減速馬達-這裡使用的是一種稱為「微型齒輪箱減速馬達」的設備,有多種轉速規格可供選擇。
- 2顆CR2032紐扣電池
- 6. 光敏電阻(LDR)
- 從玩具車上購買或拆卸的車輪
- ½吋厚的木材、中密度纖維板或其他類似材料
- 穿孔板(選購)
所需工具:
- 烙鐵
- 熱熔膠槍
- 電鑽、鑽頭組和開孔器
- 用於在木材上開槽的路由器、銑床、台鋸或其他工具
電子組裝
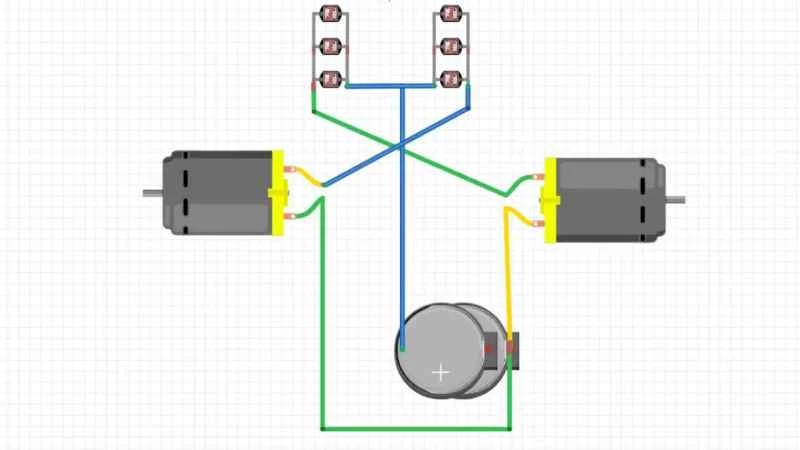
我將首先討論該設備的電子電路,然後再解釋其實際組裝方式,因為組裝方法多種多樣。如上圖所示,串聯電池(6V)的正極分別連接到6個光敏電阻(LDR)的兩端。其中三個光敏電阻位於機器人左側,每個光敏電阻的非電池端連接到右側馬達。另外三個光敏電阻位於機器人右側,其非電池端連接到左側馬達。馬達上未連接光敏電阻的引腳連接到電池負極,從而形成閉合電路。
相關報導:套上這層“皮膚”,任何物體都能變成機器人
此裝置的工作原理是:當左側光敏電阻陣列受到光照時,右側馬達的電阻降低,從而獲得動力。這會使右側馬達向前旋轉,朝向照射在左側陣列上的光源。其他三個右側光敏電阻和左側馬達則會產生相反的效果。如果兩側光照強度相等,機器人將向前移動。若任一馬達反轉,請交換電池和光敏電阻的連接線。
機械裝置

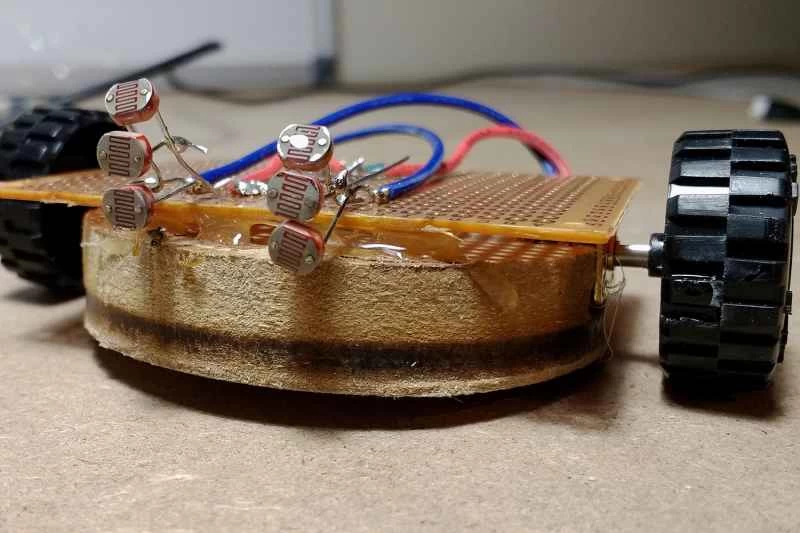
為了讓這些組件看起來像一個真正的可移動機器人,我先用銑床在一塊中密度纖維板上開了一個1/2吋的槽,用來放置微型馬達。如果你有電刨或台鋸,也可以用它們來完成這項工作。然後,我用2¾英吋的開孔器切割出一個圓形組件,作為機器人的主體,槽位於中間。最後,我在槽後面的中密度纖維板上描繪出CR2032電池的形狀,並粗略地切割出一個凹槽來放置CR2032電池。
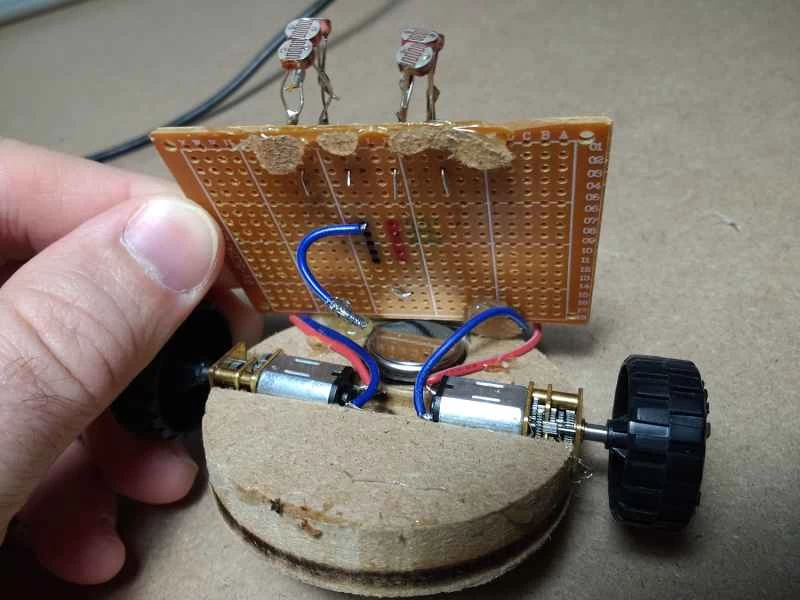
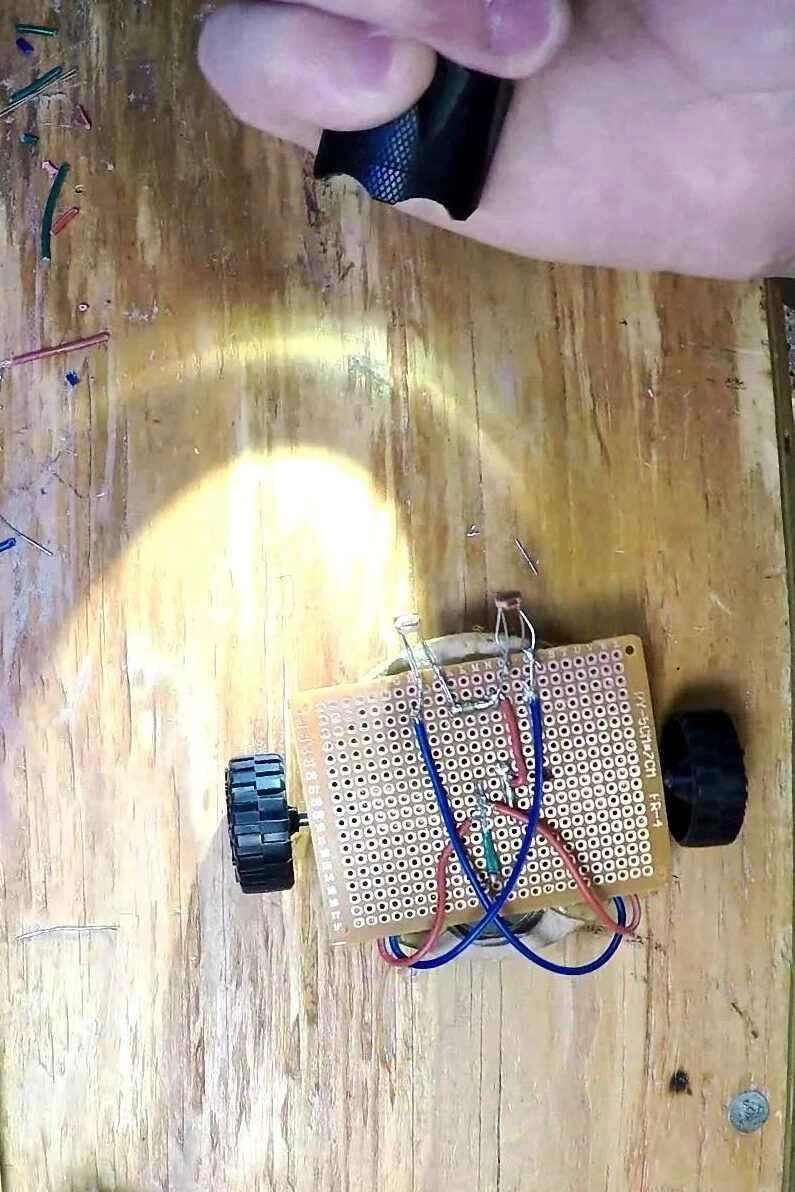
接下來,我用萬用板搭建電路,然後佈置導線,使萬用板用熱熔膠固定在MDF板上時,電池正好夾在正負極導線之間供電。 (導線剝去絕緣層後捲繞在絕緣層上。)馬達用熱熔膠和黏合好的萬用板固定,輪子則鑽孔至適當的直徑,可以直接壓入齒輪馬達。
雖然這種方案確實可行,但現在看來,直接購買一個帶有引線的6V紐帶電池座會更簡單,這樣連接更牢固,尤其是在手邊沒有電路板的情況下。然後用熱熔膠——最好是多塗幾層——把所有零件固定住。
透過 GIPHY
這就是我製作影片中展示的機器人的方法。你可以一步一步地複製我的方法,也可以用3D列印機或其他方式精心設計製作一個版本,或是直接用手頭上現有的工具和材料開始製作,看看最終效果如何。只要能讓輪子帶動機器人移動,你就能得到一個可以跟著手電筒光束移動的有趣小玩意兒。你可以用木頭、塑膠、紙板或其他容易找到的材料來製作框架。
(傑里米·S·庫克是一位自由科技記者和工程顧問,擁有超過10年的工廠自動化經驗。他是一位熱衷於創客和實驗的人,你可以在Twitter上關注他,或者在傑里米·S·庫克的YouTube頻道上觀看他的機電技術作品。)
