
2007年,馬特·丹頓(Matt Denton)在英國漢普郡的家附近,路邊停下車,觀看一台挖土機作業。他從小就對挖土機著迷,但多年來一直從事好萊塢動畫生物的控制系統設計工作後,丹頓用一種更具想像的視角看待挖土機的鏟鬥。 「它的形狀很像一條腿,」他說,「所以我開始琢磨:能不能買六個這樣的挖掘機,把它們裝在一個底盤上?」四年後,丹頓駕駛著他稱之為「螳螂」(Mantis)的、重達兩噸、高九英尺的機器人步行機四處走動。
曾參與《哈利波特》系列電影中鷹頭馬身獸(一種鷹頭飛馬)設計工作的丹頓,也曾為電影和娛樂製作過步行六足機器人,但它們的大小都和遙控玩具車差不多。他想讓「螳螂」機器人擁有SUV的大小。由於無力獨自承擔這個項目,他畫出了設計草圖,用玩具挖掘機的機械手臂製作了一個比例模型,並帶著這個模型去尋找投資人。然而,無人問津。幾個月後,一位朋友的富裕父親聽說了丹頓這個異想天開的計劃,並被他的願景所打動,同意資助這個計畫。
丹頓請他的朋友、機械工程師喬許李幫忙打造「螳螂」機器人。兩人花了幾個星期研究液壓驅動器——這種人造肌肉將驅動機器人的腿部運動。同時,丹頓將他為玩具模型編寫的程式碼修改成驅動這台巨型六足機器人的軟體。之後,他和李繪製了機器人中央底盤和六條腿的設計圖,製造並測試了其中一條腿,並委託一家製造公司生產其餘部分。然而,當鋁鋼材質的腿運到丹頓的工作室時,他發現一些用於連接各個部件的孔位缺失,另一些孔位加工粗糙。丹頓有些不耐煩,花了一週時間自己修正這些缺陷。 「我們必須讓它能用,」他說。

儘管丹頓在2011年就製造出了可用的原型機,但「螳螂」機器人重量過重,移動速度過慢。為了減輕400磅的重量,他拆除了每條腿上的四個關節中的一個。這些關節原本能夠提升機器人在不同地形上的機動性,但即使沒有它們,「螳螂」的移動表現也已經夠好了。丹頓也對底盤進行了最佳化,底盤內裝有液壓系統、柴油引擎、電子設備和駕駛座椅。
到了真正駕駛的時候,丹頓卻不敢鑽進去。 「我太害怕了,」他說。為了消除恐懼,他在六個月的時間內進行了100小時的Wi-Fi測試。第一次試駕確實很嚇人,但「螳螂號」的表現符合預期,他也逐漸適應了駕駛艙。現在,丹頓帶著他的作品參加各種活動。有人批評它的速度太慢——「螳螂號」的最高時速還沒超過兩英里——丹頓也不確定它在電影、建築或其他領域是否有發展前景。但青少年觀眾卻一眼就喜歡上它了。 “孩子們喜歡它,”他說,“他們想鑽進去,用雷射槍照射它。”
工作原理
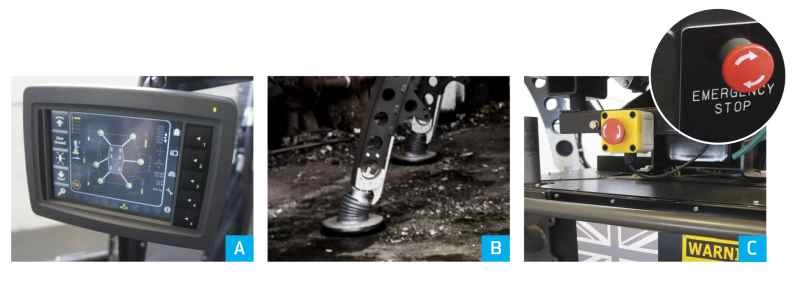
A. 控制
駕駛者透過觸控螢幕控制面板選擇幾種步態模式之一。其中一種專為崎嶇地形設計的模式會指示機器人抬起每條腿,然後再向前擺動。操縱桿可以控制機器向前、向後爬行或橫向橫移。扭轉操縱桿則可使螳螂機器人原地轉向。
B. 感測
當一隻腳觸地時,力道感應器會向內建電腦發出警報。只有這樣,行走序列中的下一條腿才能向前擺動。腳踝處的球形關節使腳部能夠旋轉並穩固地落在不平坦的地面上;但如果腳碰到邊緣,另一個感測器會告訴電腦尋找更安全的位置。丹頓希望在每條腿中都安裝超音波感測器,以便機器人能夠在下地前掃描地面。
C. 安全
丹頓說,如果發生緊急情況,「我們有兩個大紅按鈕」。一個就在駕駛艙裡駕駛員旁邊,另一個在機器後部(丹頓的一個朋友會跟在螳螂機器人後面,確保沒有動物或旁觀者被它絆倒)。這兩個按鈕都能切斷電源,讓機器人靜止不動。
又新增兩款可騎乘機器人
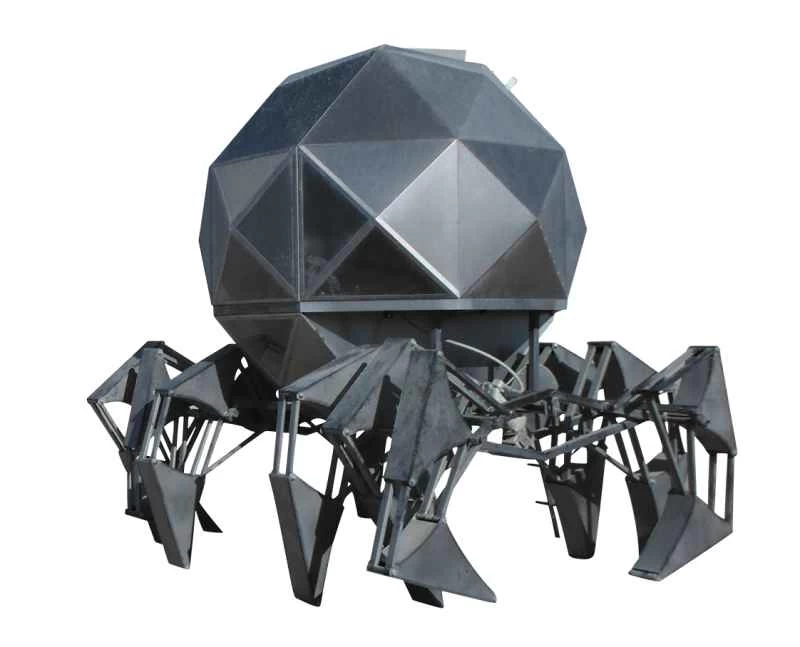
藝術家斯科特·帕倫托(Scott Parenteau)設計了他的球形行走艙,用於在內華達州黑岩沙漠舉行的為期一周的年度盛會“火人節”上提供庇護和交通工具。這個重達1800磅的圓頂由兩組六條腿支撐,電池驅動,可以緩慢移動。帕倫托希望他的「房車藝術」能啟發新的移動房屋設計——甚至可能啟發人們在火星上建立遊牧殖民地。

高中時期,坂本肇沉迷於動畫《機動戰士鋼彈》中的人形機器人,甚至組裝過鋼彈的玩具模型。如今,這位46歲的機器人專家希望打造一個59英尺高的全尺寸機器人。目前,他已經製作了一對11.5英尺高的腿(見上圖)。坂本希望今年晚些時候能加上軀幹,然後爬進這個13英尺高的步行機器人裡四處走走。
警告:我們會在發布前審核所有項目,但最終您的安全由您自己負責。請務必穿戴防護裝備,採取適當的安全預防措施,並遵守所有法律法規。
Lillian Steenblik Hwang 和 Sarah Jacoby 也對本報道做出了貢獻。
本文原刊於 2013 年 9 月的《大眾科學》雜誌。
