我是負責科學研究計畫撥款機構的材料科學工程師。我的工作主要是理論性的,所以閒暇時間我喜歡做一些動手實踐的事情。我製作遙控模型已經33年了,一直偏愛一些不常見的載具──水陸兩用車、潛水艇、氣墊船──所以室內遙控飛艇很適合我。
大約12年前,我製作了我的第一艘飛艇,那時相對輕便的遙控設備開始變得價格親民。我最新的玩具是一個氦氣球飛艇,上面裝有一個微型攝影機。這艘飛艇太顯眼,不適合真正的監視任務,但飛行和拍攝空拍照片非常有趣。它也比幾乎所有市售模型都要小,而且穩定性和操控性都更好。
以下是完整的操作說明:
步驟 1:所需的遙控齒輪
- 三個超微型舵機,重量在 2.5 克或以下:我使用的是 Blue Arrow 品牌的舵機。這些舵機可以輕鬆安裝螺旋槳(馬達軸直徑為 0.7 毫米)。
- 我使用的是DelTang Rx33超微型接收機。無論如何,請選擇重量低於2克且使用單節鋰電池(通常稱為1S)的接收機。實際上,許多接收機都可以在1S電池下工作,即使沒有明確說明。務必確保舵機和接收機的介面相容,否則最終可能需要焊接。 DelTang DSM2接收機和Blue Arrow舵機都有多種介面版本。像Micron Radio Control、Plantraco或Aether Sciences RC這樣的專業線上商店可以提供協助。
- 顯然,你需要一個相容的發射器。最簡單的、至少有3個通道的發射器就足夠了。
- 一顆70至140毫安培時的1S鋰聚合物電池(以及適當的充電器):為了將重量控制在10克以下,需要使用最小的電池(70毫安培時的電池重量約為2.5克)。較大的電池顯然可以延長飛行時間,但即使飛行時間很大程度取決於飛行方式,使用125毫安培時的電池(重量為3.5克)也能輕鬆飛行半小時。較小的電池也能輕鬆飛行15分鐘或更久,並且能夠延長乳膠氣球的飛行時間(騰出空間放置更多配重來彌補氦氣的損失)。
- 將電池連接到接收器的連接線(專業的遙控器模型商店可以提供協助)。
- 三款小型螺旋槳:我使用了Plantraco 32毫米「蝴蝶」螺旋槳。這些小型螺旋槳性能卓越,適用於0.7毫米軸。 Aether Sciences RC的「AESH34 – Hélice Micro」螺旋槳看起來也很合適。
- 一根直徑 1 毫米、長約 30 公分的碳棒
- 一塊約10公分×10公分、1毫米厚的德普龍板(如果沒有1毫米厚的德普龍板,也可以用3毫米厚的德普龍板代替)。一些膩子作為壓艙物。
- 最後,您還需要一些透明膠帶(也叫透明膠帶、透明膠帶)、一把小鉗子、幾根小橡皮筋、強力膠和一把剪刀。一個精度為0.1克或更高的電子秤會很有幫助。焊接是可選的。
如果您已經有了遙控器和飛行電池充電器,那麼所需的材料成本最高可達 80 歐元(約 100 美元)。如果您能以低價購買舵機和螺旋槳,成本可以大幅降低。如果您再選擇稍大一些的版本,配備 2 克接收器,成本甚至可以降到 30 歐元以下。
合適的發射器和充電器應該不會超過 50 歐元。這比整套 Plantraco NanoBlimp 系統略貴,但我們說的是 DSM2 系統,它擁有的頻率遠不止 4 個。

步驟二:確定重量,選擇氣球
您可以在任何氣球店購買氣球和/或充氣氦氣,或帶一個一次性氦氣罐回家。
我首先確定了所有部件的重量,然後估算了鰭片(當時尚未切割成所需尺寸)以及膠水和透明膠帶的重量。重量單位為克。
* 3 hacked servos: 3 x 1.7 * 3 propellers: 0.17 * Receiver: 0.68 * 80 mAh battery: 2.6 * 33 cm x 1mm diam. carbon rod: 0.4 * Battery lead: 0.3 * Depron fin (estimate): 0.5 * Allowance for tape and glue (estimate): 0.25總計:10克* 3 hacked servos: 3 x 1.7 * 3 propellers: 0.17 * Receiver: 0.68 * 80 mAh battery: 2.6 * 33 cm x 1mm diam. carbon rod: 0.4 * Battery lead: 0.3 * Depron fin (estimate): 0.5 * Allowance for tape and glue (estimate): 0.25
因此,該概念承諾適用於 11 英寸乳膠氣球(一種常見的派對氣球)或任何升力至少為 10 克的氣球。透過添加壓艙物來達到所需的浮力,並隨著時間的推移移除壓艙物以補償氦氣的損失。
一個全新的11吋乳膠氣球應該至少能升起11克的重量(根據製造商提供的參考數據,高度為海平面以上300公尺),但你很快就會發現升力下降。在氣球商店裡,充氣的乳膠氣球通常會在內部塗抹「Hi-Float」處理劑,這樣可以延長它們的漂浮時間。我買的那個氣球升力為14克(大約在海平面以上30公尺處)。最後我用了一個125mAh的電池,讓氣球重量保持在11克,並額外增加了大約3克的配重。不出所料,需要定期調整氣球高度,移除配重,大約10個小時後,所有的配重都被移除了。但對於一個1.5歐元的氣球來說,這已經很不錯了。
一個全新的14吋乳膠氣球可以承載超過20克的重量,所以足夠用上幾天(同樣使用「Hi-Float」漂浮劑)。至於相機版本,我準備了一個16吋的氣球,其升力超過35克。
鋁箔氣球的氦氣保持時間更長(可達數週,並且可以重新充氣),但其有效重量也更大,因此所需的最小尺寸也更大。我最喜歡的微型飛艇鋁箔氣球當然是德國齊柏林飛船公司(Deutschen Zeppelin-Reederei GmbH)生產的齊柏林NT型氣球,其升力約為21克。另一個不錯的選擇是40英寸的字母“I”型氣球,它更常見。其18克的升力對於相機版來說相當有限,但如果不安裝相機或採用更輕的結構(例如,使用飛行電池同時為相機和推進系統供電,請參閱最後一步),也是可以實現的。
關於氦氣的說明:對於這些小型飛艇來說,強烈建議使用純度為99%左右的氦氣,因為它們的浮力非常有限。雖然過去像「氣球液」(Ballonal,一種氦氣和氮氣的混合氣體)這樣的氣體很流行,但現在幾乎所有的氣球商店都使用純氦氣。
步驟三:入侵伺服器
要破解這三個舵機,首先要撕下貼紙和固定舵機的那小段熱縮管。拆下頂部組件,取出所有齒輪,包括小齒輪(如果你的螺旋槳與馬達軸不匹配,你可以保留小齒輪,然後鑽孔擴大螺旋槳軸使其適配)。拆下底部組件,小心地取出馬達和電位器。馬達通常很容易取出,而電位器是黏在裡面的。大多數情況下,你可以輕輕拉動電線將其取出。如果你不確定,也可以用小鉗子撬開舵機外殼的剩餘部分。
用一層膠帶將電路板包裹起來,以防止意外短路。
測試時,先拆下螺旋槳,並連接接收器。通電後,依序微調每個電位器,直到發射器對應的搖桿處於中立位置時,馬達不再轉動為止。
選擇你想把哪個馬達/功能分配到哪個搖桿上。我通常把上下控制放在通常的“油門”上(因為這裡用沒有自動回中功能的搖桿比較方便),把主推進器放在“升降舵”上,把左右控制放在“副翼”上(在模式 2 發射器上)。

第四步:組裝
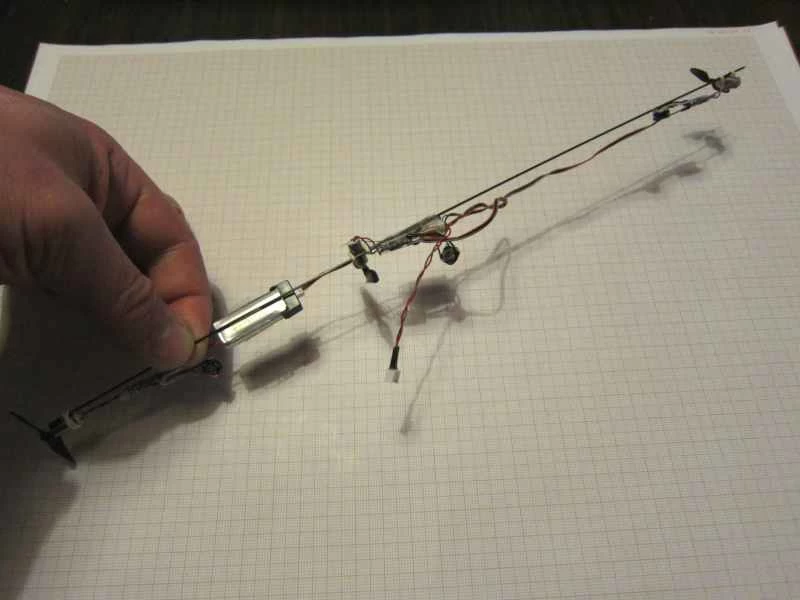
接收器也用透明膠帶纏繞,然後用少量透明膠帶將其固定在1毫米碳纖維桿的中間。為了獲得最佳操控性,我使用了盡可能長的碳纖維桿。加上我使用的裝備,桿長大約32公分。
用透明膠帶製作電池支架。將一條透明膠帶的一部分用另一條透明膠帶覆蓋,黏性面相對。這部分不沾的區域至少要和電池的周長一樣長。在距離桿子前端約 1/4 處,將膠帶的一端垂直於桿子貼上,然後將黏性端折起來。現在,用膠帶做一個環,將電池放入環中,然後用另一端的黏性端將環閉合。這樣,電池就可以輕鬆地滑入和滑出。
伺服馬達用小橡皮筋固定。前面的伺服馬達朝前(主推進器),後面的伺服馬達橫向固定(尾槳)。檢查連接器是否連接到接收器。如果您使用的是沒有伺服反轉功能的遙控器(如圖所示),請檢查搖桿轉動時尾槳是否會朝正確的方向旋轉。如果不是,請將其反向安裝。安裝螺旋槳有助於檢查對準情況。
第三台馬達安裝在組件重心附近,向下傾斜。螺旋槳要反向安裝,這樣在推動飛艇上升時才能發揮最佳性能。
用強力膠將馬達固定到位。如果您之後選擇剪掉橡皮筋,請務必只滴一小滴膠水,盡量減少橡皮筋與馬達或桿的接觸面積。取下橡皮筋後,再塗上一些強力膠。如果覺得難以操作,可以不用塗,因為三根小橡皮筋的重量大約只有0.1克。當然,務必確保膠水遠離軸桿。
第五步:氣球的固定與修剪
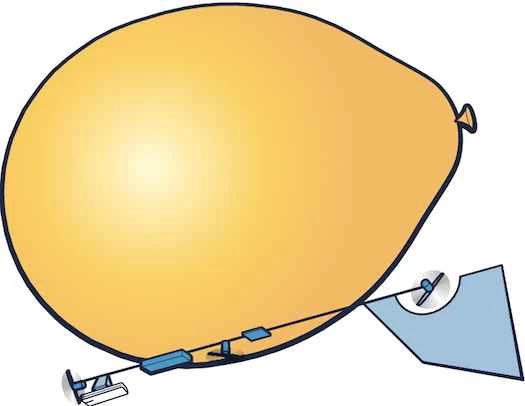
將上一步組裝好的零件如圖所示套在氣球上。兩段4公分長的膠帶就夠了。你可能需要小心地前後移動它,使飛艇能夠懸掛在空中,並且桿子大致保持水平。
最後用膩子進行修整。膩子的用量應該剛好能讓飛艇在斷電後緩慢下沉。塗抹膩子的位置應該有助於最終修整,使其保持水平懸掛。
在高空飛行時,應考慮到飛艇在高空和溫暖區域更容易增加浮力。因此,最好稍微增加一些配重。雖然這樣會加快電池消耗,因為需要更多動力,但安全總比後悔強。
使用乳膠氣球的一個優點是它會在幾小時內明顯漏氣並自行下降。而使用鋁箔氣球時,修剪時要更加小心,因為鋁箔氣球可能需要幾天時間才會完全塌陷。準備一個備用氣球,用繩子綁好,頂部貼上雙面膠,可以方便地進行一些「倒掛式」的修補,非常實用。
步驟六:飛行和安裝尾翼
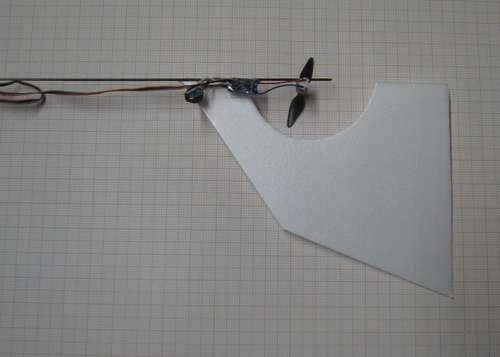
在試飛過程中,尾翼被證明對直線飛行非常有效,使飛行變得相對容易。首先,雖然螺旋槳很小,但上下旋轉的螺旋槳能為氣球提供一定的旋轉。其次,尾槳的動力明顯過剩。尾翼能讓飛艇保持直線飛行,剩餘的動力還能在需要時進行小幅轉彎。
尾翼是用德普龍板做的,用膠帶黏上去的。我把它設計成下垂狀,這樣可以保護螺旋槳不撞到地板或牆壁。同時,它也能讓飛艇與任何著陸面保持一定距離。這一點非常重要,因為中間的螺旋槳在靠近地面時效率會降低,導致起飛困難。所以,不會出現氣墊船效應。
顯然,需要對鰭的重量調整進行修正。
有了尾翼,飛艇飛行並不難,但要完全控制它還需要一些練習。
向前推進需要更大的向上推進力來補償。前螺旋槳會加速氣球下方的空氣,產生類似倒置機翼的效果。
我通常會先放慢速度,直到飛艇保持大致相同的高度,然後再稍微加大速度,開始向前移動,調整速度以保持大致相同的高度。
第七步:減肥小撇步
與 11 英寸氣球一樣,升力有限,所以減掉半克或更多重量是值得一試的。
一個相對簡單的辦法是拆掉中間馬達的電位器和電路板,然後把馬達焊接到內建在電調(ESC)的接收器上(如果它有的話,例如DelTang系列就有)。顯然,這樣就失去了反轉功能,所以你絕對需要進行大幅度的微調。另一方面,與伺服電路相比,這種方法在比例控制方面有了很大的提升。你也可以用它來做前進推進,但這樣就失去了後退功能。我建議在較大的房間使用後一種方法,因為在這種情況下,安全降落可能比倒車更重要。
如果你擅長一些簡單的焊接,你可以用兩個小的(1/10 瓦)4.7 千歐姆電阻器來替換電位器。
您可以考慮直接焊接接收器來替換連接器,但要想像Plantraco Nanoblimp那樣使用9吋氣球,就必須將總重量控制在6克以下。這需要另一種方法和另一個項目。 (如果您有興趣,請在Instructables上訂閱我。)
步驟 8:新增攝影機
我用的是一款所謂的「808型汽車鑰匙微型攝影機」。這種微型攝影機價格非常便宜(不到10歐元),非常適合做實驗。你需要一把小型十字螺絲起子來拆卸它。如果你選擇使用飛行電池供電的超輕量版本,則需要額外的與飛行電池相容的公母插頭以及焊接工具。
查克·洛爾的非商業資訊網站上有大量關於市面上各種型號的資訊。購買前請務必查看。我有一個所謂的3號和一個8號,可以證實3號更好,正如網站上推薦的那樣。
不要指望它有頂級的畫質,但它適合娛樂。動態模糊比較嚴重,尤其是光線較暗的情況。不過對我來說,它最大的缺點是視角太窄。我已經訂購了一個廣角果凍鏡頭來嘗試改善這個問題,但它還沒到貨。所以之後我會再回報使用情況。
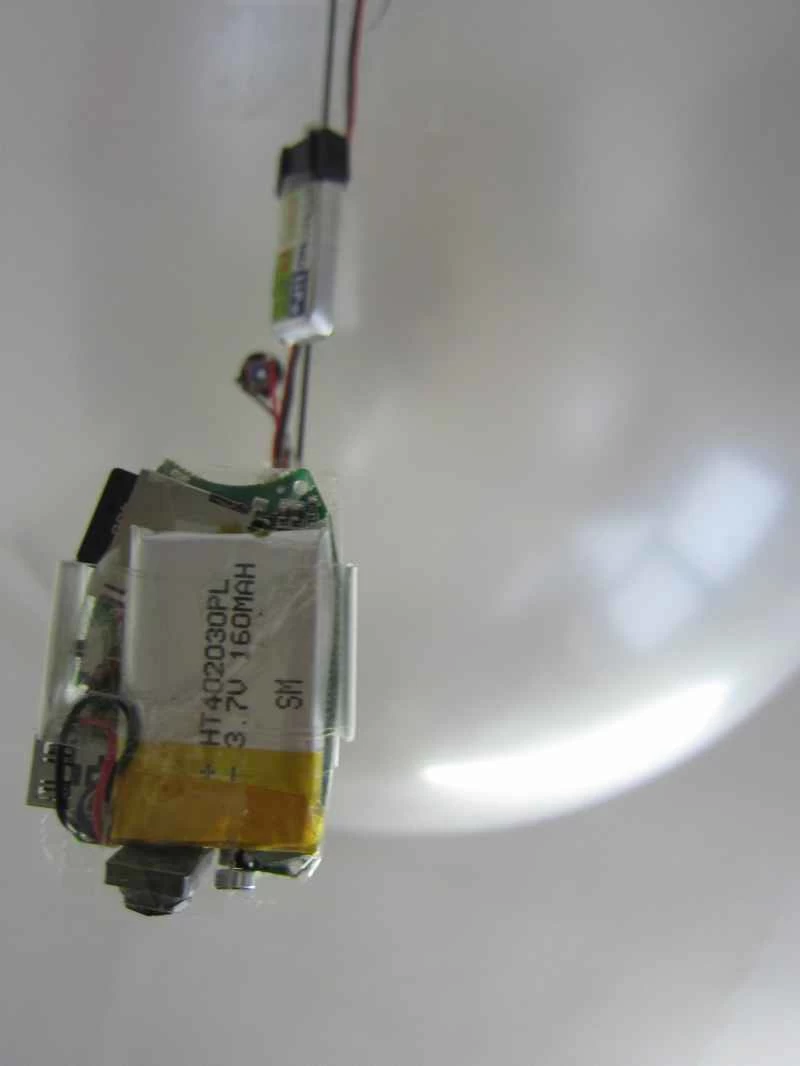
我把攝影機從鑰匙圈的偽裝中剝離出來,所以它的重量只有大約10克。我用膠帶把它包起來,以防止電路板短路,同時又不影響Micro SD卡槽和mini USB接口的使用。膠帶還能固定攝影機本身,因為它是透過柔性連接件連接到電路板上的。
將折疊好的德普龍條用膠帶粘在攝影機上,使其懸掛在前電機下方。
如果你願意,可以使用飛行電池為相機供電,這樣可以節省約 4 克重量。在這種情況下,你需要額外的公母電池插頭,以便在飛行電池和接收器之間焊接一個額外的連接(請參閱最後 4 張圖)。但我建議不要透過相機為飛行電池充電。原廠電池似乎帶有保護/穩壓電路,而遙控電池則需要依靠遙控充電器來實現這些功能。

