在軟體機器人領域,工程師利用柔軟的材料製造機器人,使其更加耐用、靈活,並且更適合在人類周圍操作。如今,勇於嘗試的DIY愛好者也能親手打造這些柔軟的機器:去年九月,哈佛大學在線上發布了一套開放取用的軟體機器人工具包。
哈佛大學推薦的一些材料和技能可能超出了普通家庭機器人愛好者的能力。但只要稍加巧思,你就可以用更便宜的零件和更簡單的技術來替代。這個項目利用廉價腳踏氣泵的波紋軟管、細長的氣球(可以扭成各種動物形狀的那種)和其他一些簡單的物品,製作出可活動的「手指」。將五個手指連接到一個肢體上——在這個例子中,肢體是一個玩具盔甲上的塑膠護腕——你就可以製作出一隻機械手。
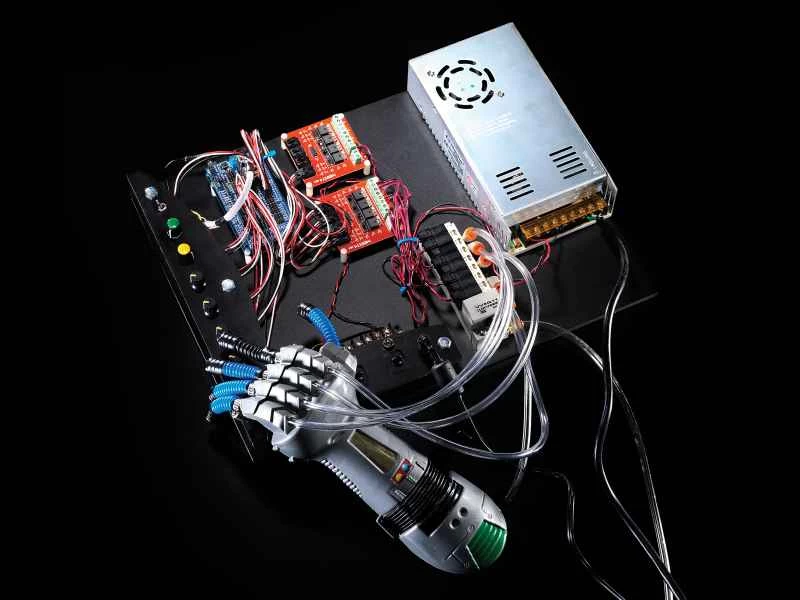
組裝好機械手臂後,就到了專案的第二階段:搭建流體控制板。 Arduino 控制器控制並協調氣閥,使機械手臂做出和平手勢、放鬆下垂,甚至豎中指。
統計數據
時間: 8 小時
花費: 70美元(手持),400美元(控制板)
難度: 5/5
材料

7/16吋內徑波紋軟管
5/16吋木榫
1/4吋外徑乙烯管
小型軟管夾
五個 1/4 英吋軟管倒鉤 x 1/4 英吋外螺紋接頭
五個 1/4 英吋軟管倒鉤 x 1/4 英吋內螺紋接頭
電工膠帶
黃色鐵氟龍膠帶
幾顆長氣球(350Q 型)
1吋×6吋的板材或其他支撐物
流體控制板
機器手操作說明
1. 將5/16吋的木榫插入帶肋軟管中,以保持軟管筆直。使用中心沖頭,沿著軟管接縫,小心地在每條肋條之間打孔。將軟管翻轉過來,沿著另一個接縫重複上述步驟。
2. 使用台鑽在軟管肋條之間的每個中心沖孔位置鑽孔,保留木榫以提供支撐。最好分別在軟管兩側鑽孔,而不是直接鑽穿。完成後,帶肋軟管兩側應該整齊地排列著一排孔。這些孔可以起到應力釋放的作用,防止軟管在彎曲時開裂。
3. 取出木榫,用美工刀將軟管切成五個 3 吋長的指狀段。對於每個指狀段,用美工刀小心地沿著每根肋條之間的縫隙,從一側的孔到另一側的孔進行切割。兩端的前兩根肋條不要切開。只需切割軟管的一側即可。切記不要劃破應力釋放孔的另一側,否則會大幅降低指狀段的可靠性。現在,軟管在一個方向上的彎曲幅度會大於在另一個方向上的彎曲幅度。
4. 將另一根木棍插入其中一個長氣球中。用它輕輕地將氣球塞進一根手指裡,直到氣球末端伸出足夠長,可以抓住為止。取出木棍,將氣球尖端約 0.6 公分(1/4 英吋)折到軟管邊緣。用一段電工膠帶將氣球尖端纏繞在手指尖端固定。
5. 現在,從未纏膠帶的一端(氣球外側)將木榫重新塞入手指內。插入至距離指尖兩根肋骨的位置。在指尖塗滿熱熔膠,待其冷卻後,小心取出木榫。
6. 用電工膠帶包住手指末端,蓋住熱熔膠黏合處。再纏繞一層電工膠帶,即可密封手指末端。
7. 將氣球開口端剪掉,留出比手指末端長約一吋的部分。將氣球開口端拉伸並套在手指末端。
8. 對每個手指重複步驟 4 至 7。
9. 用黃色鐵氟龍膠帶纏繞每個公接頭的螺紋。將每個公接頭旋入對應的母接頭,並用活動扳手旋緊。然後用更多的黃色鐵氟龍膠帶將每個母接頭纏繞數圈。這些接頭的末端應該緊密地插入每個接頭的開口。
10. 使用小型軟管夾將每個指狀物固定在五個軟管倒鉤的鐵氟龍包裹端上。
11. 現在用熱熔膠將每個手指牢固地黏在1×6英吋木板(或其他支撐物)的末端,形成一隻手。最後,將一段1/4英吋外徑的乙烯軟管連接到每個手指上的開口軟管接頭。
12. 現在機械手已經完成-但它還需要一個控制系統。您可以參考哈佛大學的軟體機器人工具包獲取靈感,或直接按照以下說明操作。
建構流體控制板
這是一個複雜的項目。由於控制板的製作需要投入大量的時間和金錢,因此在規劃製作方案時,請考慮未來的擴展需求。例如,您可以考慮購買一個八通歧管以及相應的閥門和接頭,以便擴展控制板,使其能夠控制比機器人手專案所需的五個執行器更多的執行器。如有任何關於專案的問題,請聯絡 Andrew Terranova。
控制板材料
帶調節器的空氣壓縮機
1/4吋Sintra PVC板(12吋 x 24吋)
24V 15A 直流電源
12V 1A 直流電源,附 M 型 2.1mm x 5.5mm 同軸連接器
面板安裝式同軸電源插座,M 型,2.1 mm x 5.5 毫米
同軸電源插頭,M 型,2.1 毫米 x 5.5 毫米
Arduino Mega 2560 或相容型號
適用於 Arduino Mega V2 的感測器擴充板(含連接線)
兩塊 YourDuino 功率 FET 開關板
五個 SMC VQ110U-5M-M5 氣閥(或類似產品:24VDC,引線的連接器)
一個 SMC VV3Q11-05 五通歧管(或類似產品)
六個SMC KQ2L07-M5彎頭接頭
1/4吋外徑乙烯管
六個 50 千歐姆電位器(「電位器」)
七個6毫米軸電位器旋鈕
22號絞合線或預先黏合線(黑色、紅色和黃色)
24號多芯電纜或扁平電纜(需要13條導線)
6位接線端子
三個單刀雙擲撥動開關
兩個5毫米黃色LED燈
兩個5毫米LED安裝座
560歐姆電阻
1.2千歐姆電阻器
十二個 M 3-mm x 6mm 十字槽塑膠 PCB 板緊固件
十二個 21 毫米 x 6 毫米的 PC 板墊片
五個 1/4 英吋 2 英吋六角螺栓
十個 1/4 英吋六角螺母
兩顆 10-32 規格的 1 英吋螺栓
雙面泡棉膠帶
熱縮管
線纜紮帶(用於線纜管理)
控制板工具
英式鋸
鉛筆
中心沖頭
鑽頭和鑽桿(13/64″、17/64″,其他尺寸依零件尺寸而定)
公製絲錐 M 3-mm x 0.5-mm,標準 10-32 英吋絲錐(其他尺寸依零件尺寸而定)
電烙鐵和焊錫
剝線鉗
一字螺絲起子和十字螺絲起子
活動扳手
打火機(用於熱縮管)
控制板使用說明
1. 佈局控制板。您可以參考照片進行設計,但需根據自身需求進行調整。電源和控制電路靠近邊緣以便操作會比較方便。將 Arduino Mega/感測器擴充板放置在控制電路和 MOSFET 功率開關之間也很方便。 MOSFET 模組應靠近氣閥/歧管。電源可以放置在任何位置,但需考慮電路板上的電路佈線方式。
2. 使用台鋸將Sintra板切割成適合您佈局的尺寸。 12吋×16吋應該可以。這將作為控制板的底座。
3. 從剩餘的Sintra板上,裁切一塊用來安裝控制旋鈕的板材(約12吋×2¼吋)。再裁切一塊用於安裝電源開關和指示燈的板材(約2吋×6吋)。將這兩塊板材的一側裁成弧形,可以使其更緊湊地安裝在底座上,並增添美感。
4. 使用鉛筆和中心沖在兩個安裝板上標記 50 千歐姆電位器、開關、LED、電源插孔以及將電路板固定到基座上的六角螺栓的孔位。
5. 在安裝板上鑽孔。如果您想直接將電位器旋入Sintra板而不是用螺帽固定,可以在Sintra板上攻牙。如果您沒有合適尺寸的絲錐來攻絲,可以使用一個「備用」電位器作為絲錐(這樣做可能會損壞電位器)。
6. 使用六角螺栓和螺帽將兩個安裝板抬高到底座上方。在安裝任何組件之前,先將安裝板對準底座上所需的位置。以先前為六角安裝螺栓鑽的孔為導向,在底座上做好標記。然後在底座上鑽 13/64 英吋的孔,並使用 1/4 英吋 x 20 的絲錐攻牙。
7. Arduino Mega 和 MOSFET 開關應使用 M3mm x 6mm 十字槽塑膠 PCB 板螺絲進行安裝。標記、鑽孔並攻牙以安裝它們和其他元件。 24V 電源可以使用雙面泡棉膠帶進行固定。空氣歧管可以使用兩顆 10-32 英吋螺栓或泡棉膠帶進行固定。
8. 將24V電源、空氣歧管、MOSFET開關、Arduino Mega和感測器擴充板以及6位元接線端子安裝到基座上。接線端子可以用小型自攻螺絲或泡棉膠帶固定。
9. 將所有電位器、開關、LED 和電源插孔安裝到兩個安裝板上,但暫時不要將安裝板安裝到底座上。您還需要先進行一些焊接工作。
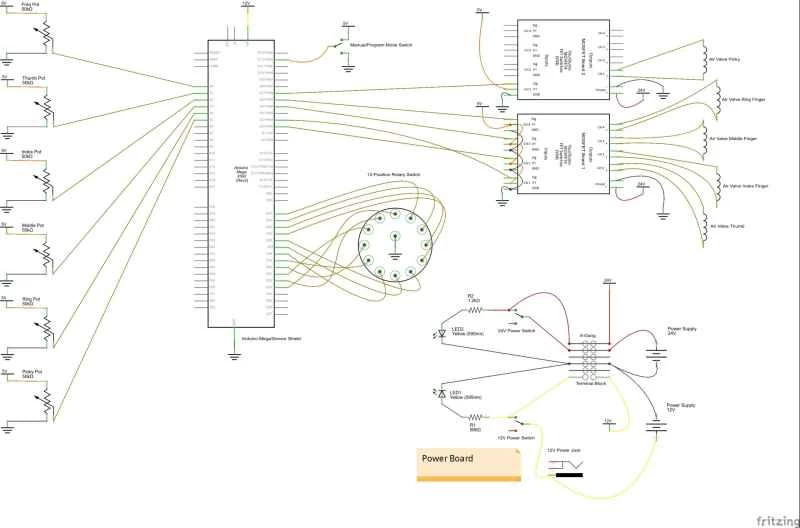
10. 依照提供的電路圖,將控制安裝板上的六個電位器、一個12位開關和一個單刀雙擲開關連接起來。如圖所示,將導線連接到Arduino Mega感測器擴充板上。
11. 依照隨附的電路圖,為電源安裝板連接 12V 電源插座、電源開關和 LED 指示燈。如圖所示,將電線連接到 6 位元接線端子。如圖所示連接 24V 電源,並連接 12V 電源插座。暫時不要將電源插頭從交流電源插座拔下。
12. 使用 1/4 英吋六角螺栓和螺帽將控制板和電源板固定到底板上。每個螺栓,一個螺帽應與底板齊平,另一個螺帽應從下方與安裝板齊平。這樣可以牢固地固定安裝板。
13. 將電源供應器從六位接線端子引至 Arduino Mega 和 MOSFET 開關。詳情請參考電路圖。
14. 如圖所示,將 Arduino Mega Sensor Shield 的數位輸出接腳連接到 MOSFET 開關的輸入通道。然後將 MOSFET 開關的通道輸出連接到五個 SMC 氣閥。
15. 將五個氣閥上的 1/4 英吋外徑乙烯軟管連接到機器手臂。再用 1/4 英吋軟管將空氣歧管的入口連接到空氣壓縮機。空氣壓縮機的輸出壓力應設定為約 20 磅/平方英吋。您可能需要根據實際情況略微調整空氣壓縮機的壓力,但這是一個很好的初始值。
16. 接上 12V 和 24V 電源。暫時只打開 12V 電源的開關。
17. 下載隨附的軟體範例程式。安裝 Arduino 程式設計軟體,連接到 Arduino Mega,然後編譯程式程式並將其下載到 Mega。
18. 現在打開24V電源開關。將功能選擇開關撥到一檔,您應該可以用五個電位器中的一個來控制每個手指。試著將佔空比電位器調整到不同的位置,看看效果如何。將功能選擇開關撥到另一檔,12位開關將控製手的位置或移動。
19. 瞧你創造的傑作!這是我們的軟體機器人手在工作:
本文最初發表於 2015 年 5 月的《大眾科學》雜誌,標題為「向柔軟的機器人揮手問好」。